Bridging software and
the physical world.
Hi, I’m Hishaam. I build robotics systems end to end, including mechanics, electronics, firmware, control, and software.

A hands on approach.
My approach to engineering is practical. I enjoy the mathematical side of robotics, but I learn best by building, testing, and iterating.
I treat my home setup as a rapid prototyping lab, and I have expanded my skillset beyond mechatronics into web development and e commerce.
Outside the lab, I am an Explorer Scout Leader. Running weekly sessions and expeditions has built strong leadership and communication.
Education
Elsewhere
YouTube has project videos. Instagram is professional and shows builds, progress, and behind the scenes.
Things I’ve built
Case studies with decisions, architecture, and outcomes.

Fracture Immobilisation Trainer
High-fidelity cast application trainer with flow simulation, haptics, and sensing to bridge theory and clinical practice.
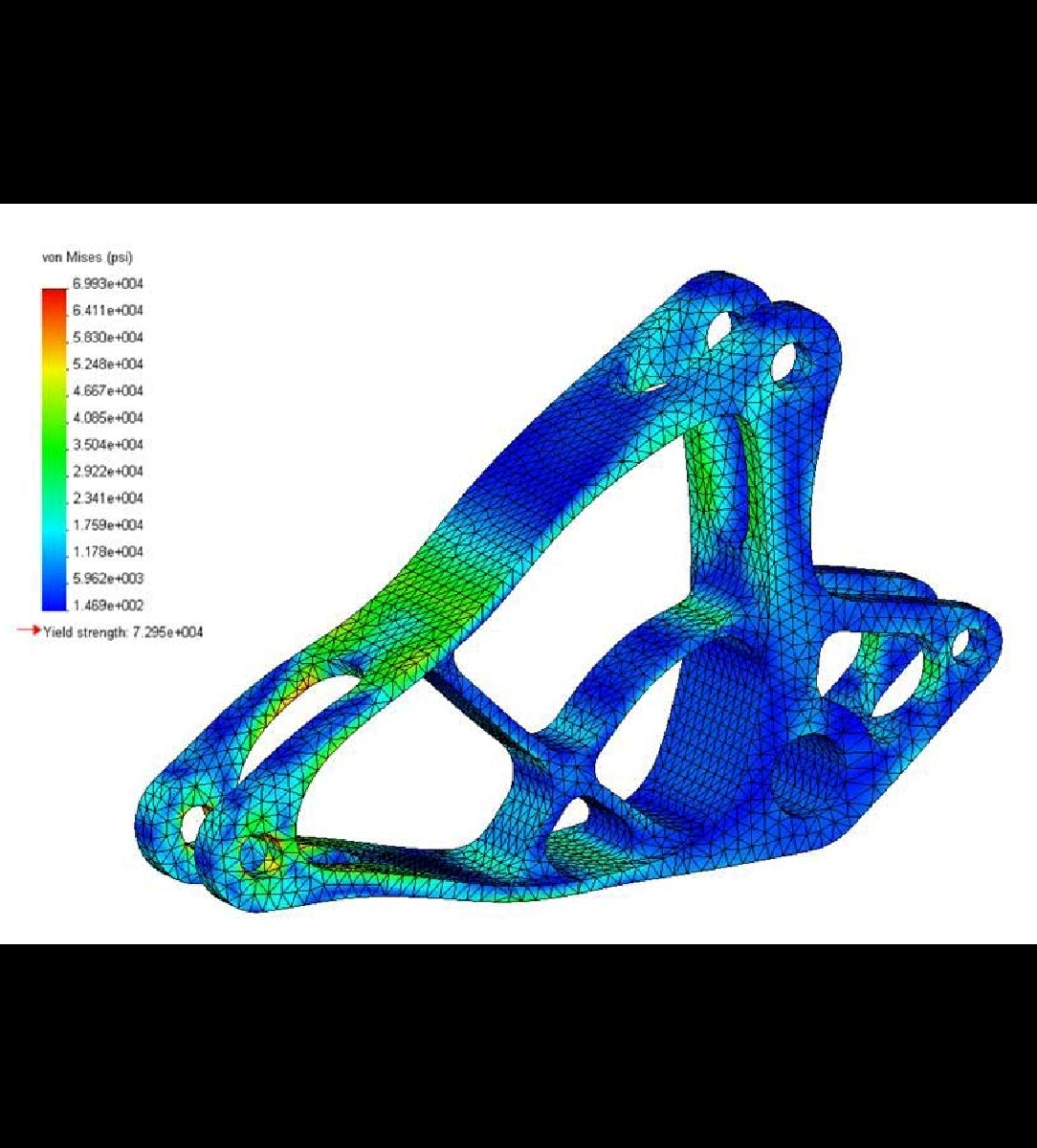
Formula Student Suspension
Suspension optimisation and redesign work using CAD + Ansys to balance grip, stiffness, and durability.
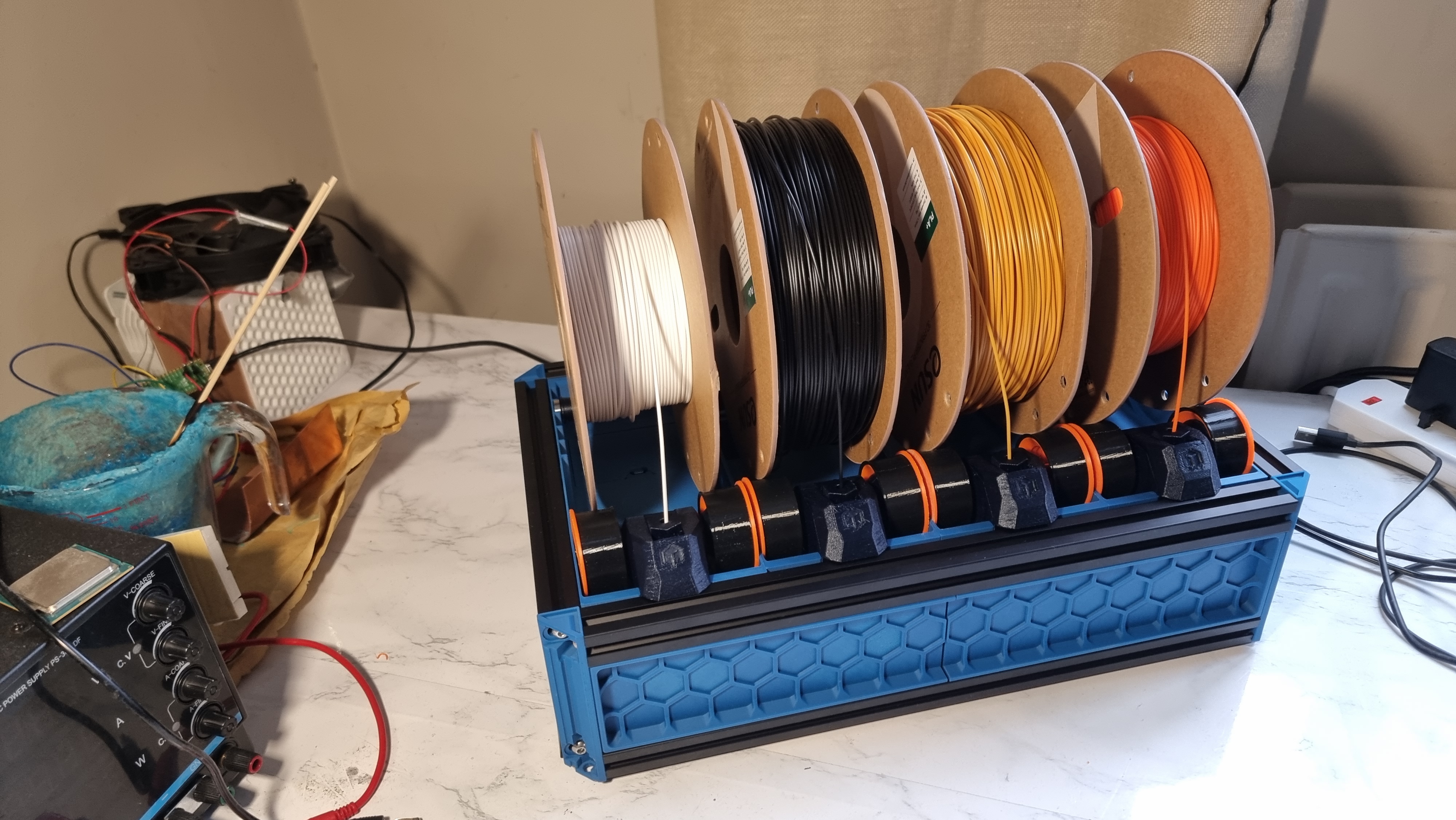
BoxTurtle Filament System
Automated multi-material workflow built on an Ender 3: hardware mods + macros for reliable filament swaps.
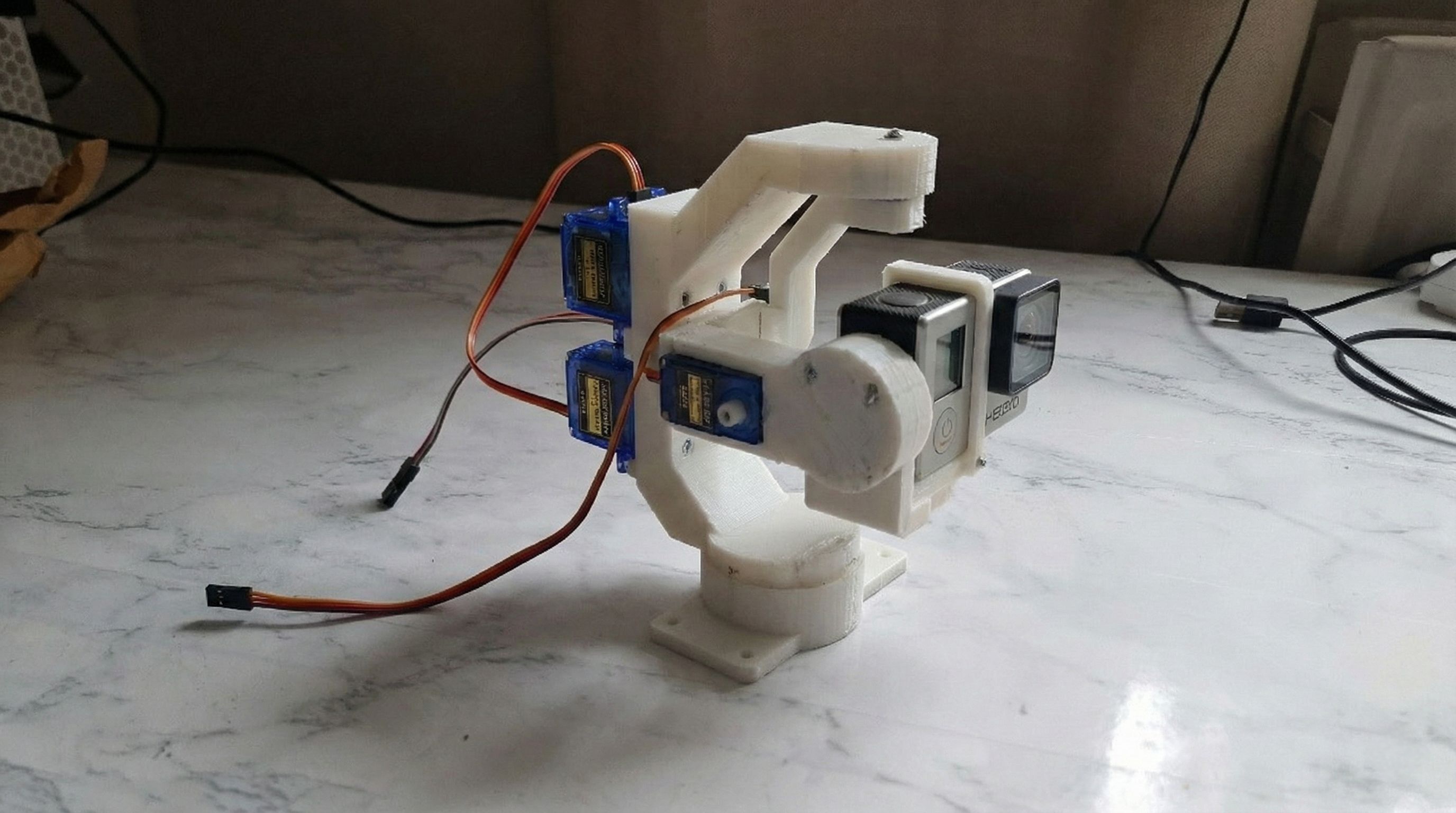
Active Camera Gimbal
DIY 2-axis stabiliser with custom C++ firmware and real-time PID control loops.
Work experience
Engineering Design and Research Intern (EOD Systems)
Worked with bomb disposal robots: firmware debugging, diagnosing physical failure points, and supporting upgrades to legacy platforms.
Spring Insight Programme (Quant Stream)
Explored modelling workflows and data analysis in a large organisation.
Clinical Data Administrator
Managed clinical datasets and supported operational processes.