Goal
Build a compact stabiliser that keeps a camera level against movement — then make it actually feel stable, not just “move”.
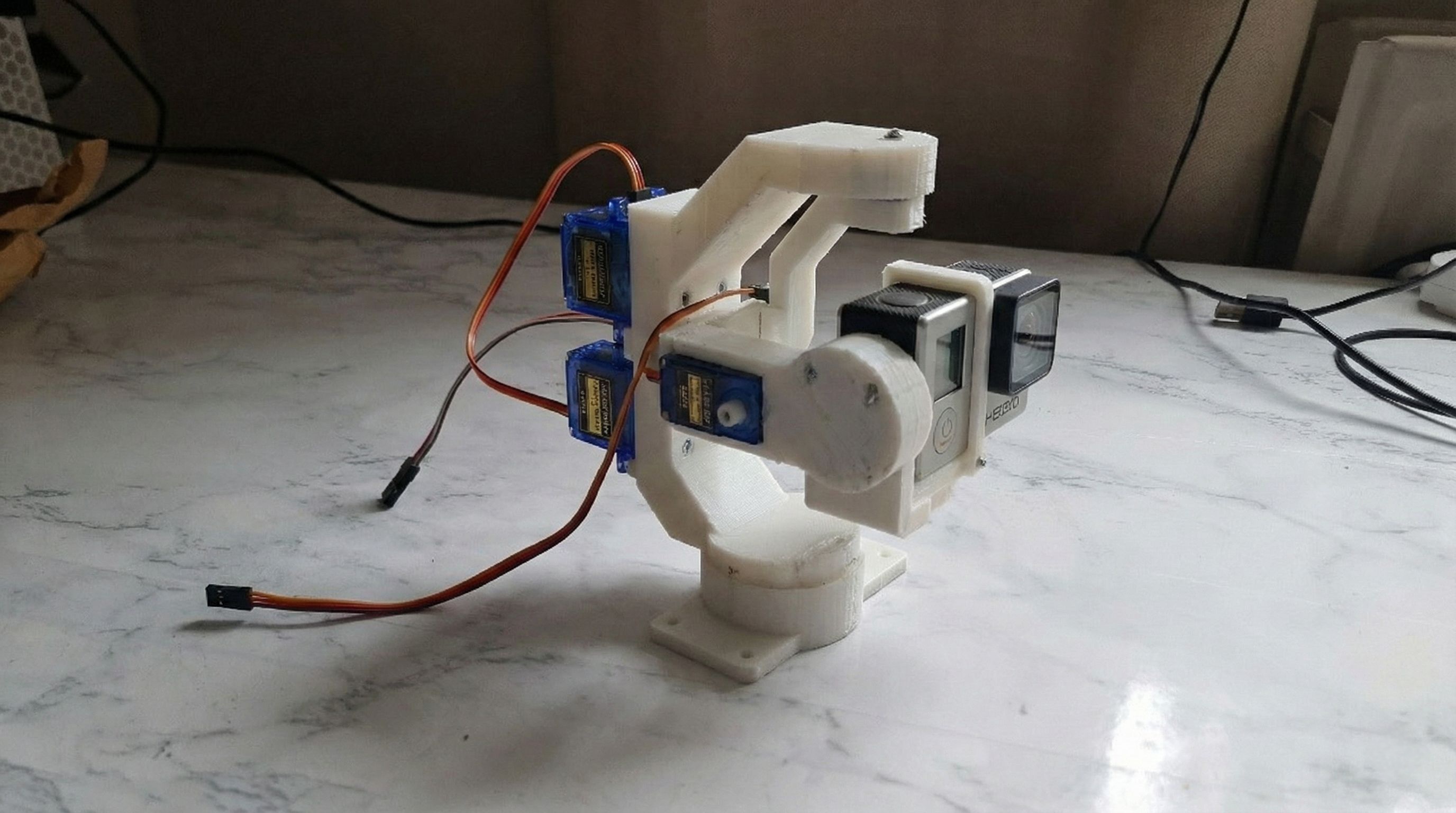
What I built
- Real-time PID loops for stabilisation
- Firmware architecture focused on predictable timing (control loops hate jitter)
- Mechanical layout designed for stiffness and smooth motion
What I’d improve next
- Add better IMU filtering (e.g., complementary / Kalman) and quantify latency.
- Create a proper tuning workflow (step responses, frequency response checks).